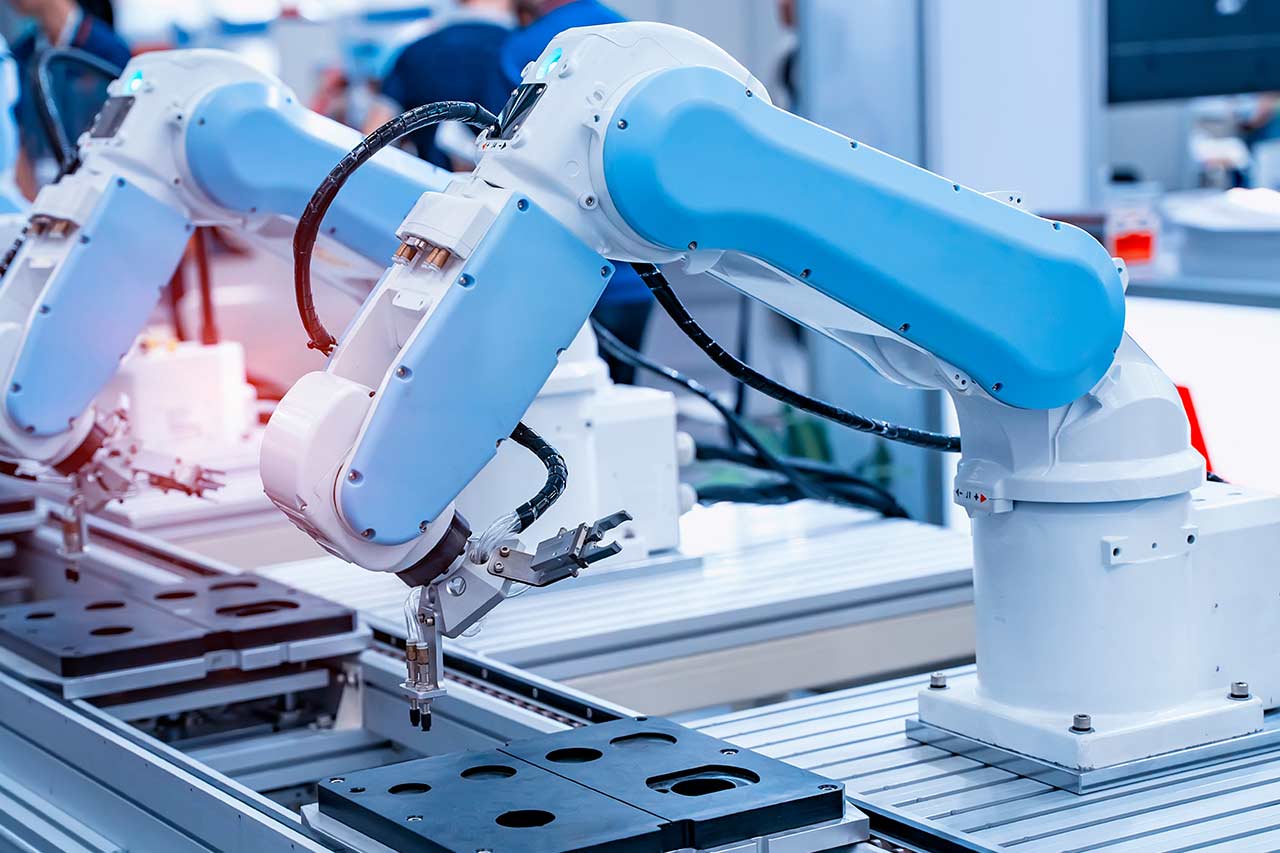
Autonomous industrial robotics: robots to assist humans
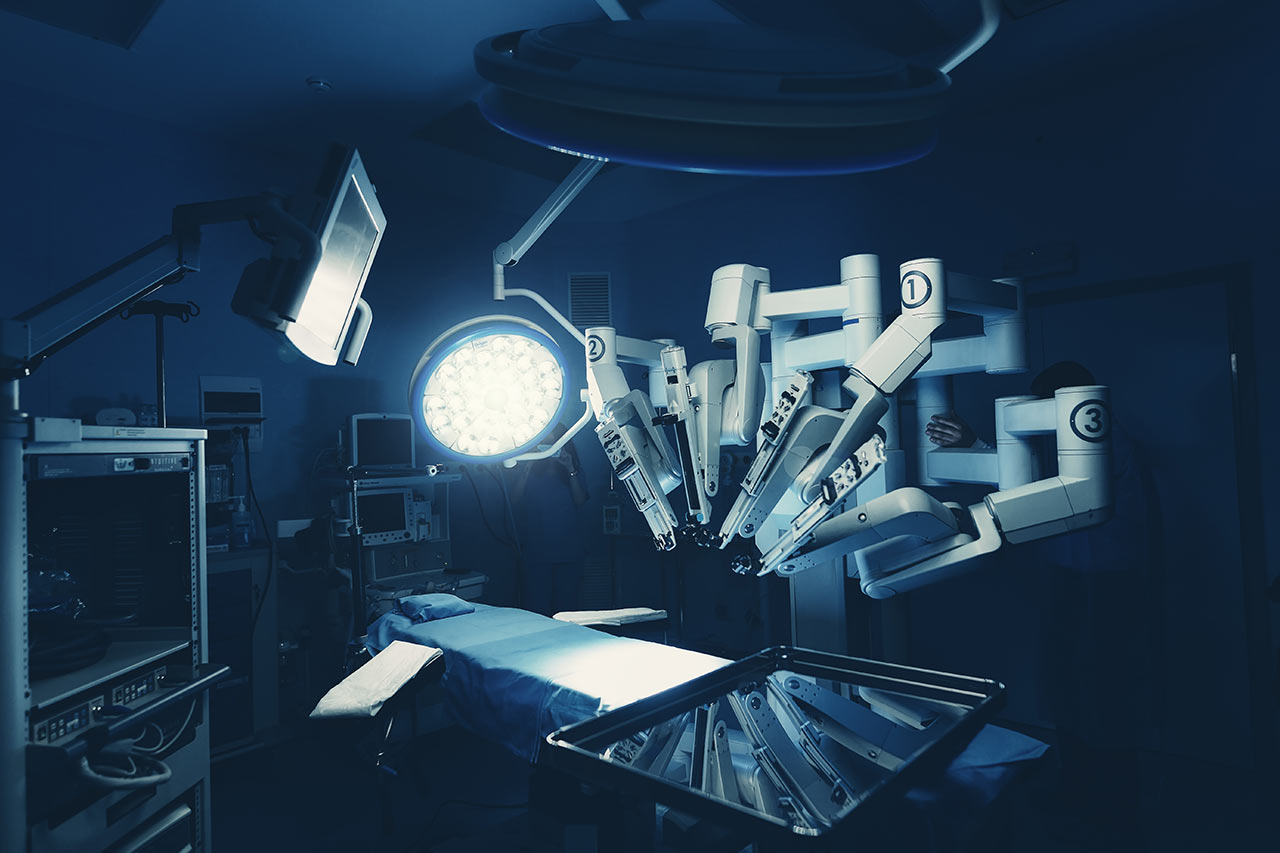
Since the first robotic solutions developed at the beginning of the 20th century, such as John Hammond and Benjamin Miessner’s electric dog in 1915 or Albert Ducrocq’s electronic fox in 1953, robotics has evolved considerably. Robotic solutions have become more complex, more agile and more efficient, and have established themselves in a number of sectors, including in medical, military and industrial.
If robots can replace humans in some industrial applications, which raises ethical, social and economic questions that must be taken into account, the main interest of their development remains to assist humans in dangerous situations or for actions that are difficult to perform. Thus, industrial robots were first developed to intervene in place of humans in dangerous areas (e.g. nuclear), in areas that are not easily accessible (e.g. in case of fire), or in heavily damaged areas (e.g. in case of a disaster). The use of robots in this type of situation limits the exposure of humans, and allows exploration, inspection, maintenance and even rescue missions without endangering humans. Similarly, robots can perform strenuous actions, whether handling heavy loads or performing very precise and/or repetitive actions.
Learn more about the challenges of robotics in healthcare >
Bipedal or quadrupedal robots that are increasingly advanced in terms of locomotion and prehension
Among the diversity of existing robots, one branch of robotics focuses on the development of robots, whether they move on two legs or four, that are as close as possible to human or animal locomotion. This type of autonomous robot is certainly one of the most complex to develop because walking movements are not linear, and require a complex dynamic balance, both computationally and energy intensive.
Today, several dozen bipedal and quadruped robotic solutions have been developed and hundreds of others are still at the patent stage. These robots move in an increasingly stable and flexible way, especially the quadruped solutions, even if the speed and flexibility of human or animal movements are still far from being reached. Their ability to grasp, and particularly that of bipeds, has also improved greatly, with the possibility of manipulating tools or everyday objects for the most agile of them. This improvement brings them even closer to their human models and the use that can be made of these humanoid robots is increased tenfold, with many actions that can be performed by these autonomous robots, replacing or complementing humans.
Which autonomous robots seem the most advanced today for industrial use?
Thus, many robotic solutions come very close to humans and animals in terms of mobility but also in range of actions. However, for the industrial sector, two robots seem to stand out from their colleagues: two quadruped dogs, SPOT from the American company Boston Dynamics and ANYmal developed in Switzerland by ETH Zurich and ANYbotics. These two robots seem to be much more adapted to industrial uses than the bipedal robots currently developed. SPOT and ANYmal are able to move with agility both indoors and outdoors, avoiding obstacles, climbing stairs and opening doors, and seem to be the most advanced for inspection and maintenance applications in industry.
The movement and grasping capabilities of robots are constantly improving and the robotic solutions that will be developed in the coming years will certainly be able to perform a greater number of actions and with greater precision. In addition to these developments, there is also an improvement in autonomy and artificial intelligence, which will gradually shorten the gap that still exists between man and machine. This will open up other possibilities for the use of these tools but will also strengthen the debate on the place of the machine in human society. Are you interested in the issue of autonomous robotics for your own industrial activities? We are here to help you!
About the author,
Margot, Senior Consultant, in Alcimed’s Energy Environment Mobility team in France